Определение. Функция $f: \mathbb{R}^n \to \mathbb{R}^m$ называется линейной, если для неё выполнено:
- $f(x+y) = f(x) + f(y)$
- $f(ax) = a f(x), ; a \in \mathbb{R}$
Например, линейными являются:
- Функция, которая «растягивает» вектор в $k$ раз: $f(x) = k x$.
- Функция, которая поворачивает вектор на плоскости на угол $\theta$.
- Функция, которая проецирует трёхмерный вектор на какую-нибудь плоскость.
- Скалярное произведение $f(x, y) = x \cdot y = \sum x_ky_k$ также линейно по обоим параметрам.
Из одних лишь двух пунктов в определении можно вывести много полезных свойств:
- Сумма линейных функций является линейной функцией.
- Композиция линейных функций $f(g(x)) = (f \circ g)(x)$ является линейной функцией.
- Сумма линейных функций коммутативна: $f+g = g+f$.
- Сумма линейных функций ассоциативна: $(f+g)+h = f+(g+h)$.
- Композиция линейных функций ассоциативна: $(f \circ g) \circ h = f \circ (g \circ h) = f \circ g \circ h$.
- Композиция в общем случае не коммутативна. Пример: $f(x) = (-x_2, x_1)$ — поворот точки на плоскости на прямой угол, $g(x) = (x_1, 0)$ — проекция на $Ox$. Почти для всех точек плоскости важен порядок этих двух операций.
Линейная алгебра занимается изучением линейных функций.
#Матрицы
Можно показать, что любую линейную функцию $f: \mathbb{R}^n \to \mathbb{R}^m$ можно представить в следующем виде:
$$ f(x) = \begin{pmatrix} a_{11} \cdot x_1 + a_{12} \cdot x_2 + \ldots + a_{1n} \cdot x_n \\ a_{21} \cdot x_1 + a_{22} \cdot x_2 + \ldots + a_{2n} \cdot x_n \\ \ldots \\ a_{m1} \cdot x_1 + a_{m2} \cdot x_2 + \ldots + a_{mn} \cdot x_n \end{pmatrix} $$ Матрицы представляют собой просто очень компактную запись этих коэффициентов $a_{ij}$. $$ A = \begin{pmatrix} a_{11} & a_{12} & \ldots & a_{1n} \\ a_{21} & a_{22} & \ldots & a_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ a_{m1} & a_{m2} & \ldots & a_{mn} \\ \end{pmatrix} $$Каждой линейной функции $f$ из $\mathbb{R}^n$ в $\mathbb{R}^m$ соответствует какая-то матрица $A$ размера $n \times m$ и наоборот. Число $n$ равно количеству строк, а $m$ — количеству столбцов. Элемент на пересечении $i$-ой строки и $j$-го столбца будем обозначать $A_{ij}$. Не перепутайте.
#Связь с векторами
Если вектор — это упорядоченный набор скаляров, то матрицу можно рассматривать как вектор векторов. Вектор, в частности, можно представить как матрицу, у которой одна из размерностей равна единице — тогда его называют вектор-столбец либо вектор-строка.
typedef vector<vector<int>> matrix;
Ещё есть тензоры — ими называют все объекты ещё более высокого порядка: векторы матриц (трёхмерный тензор), матрицы матриц (четырёхмерный тензор) и векторы матриц матриц и так далее.
У тензоров есть своя интересная алгебра, но в контекстах, в которых с ними сталкивается обычный программист, никакая алгебра, как правило, не подразумевается, и этот термин используется лишь потому, что в словосочетании «многомерный массив» слишком много букв.
#Матричное умножение
Пусть линейной функции $f$ соответствует матрица $A$, а функции $g$ соответствует матрица $B$. Тогда композиции этих функций $h = f \circ g$ будет соответствовать произведение $C$ матриц $A$ и $B$, определяемое следующим образом:
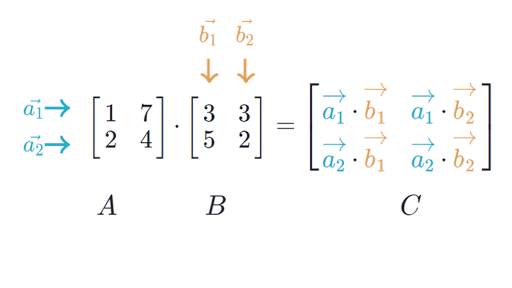
$$ C = AB: \; C_{ij} = \sum_{i=1}^{k} A_{ik} B_{kj} $$Читатель может убедиться в этом, аккуратно расписав подстановку формул для $f$ на вход $g$.
При перемножении матриц руками удобно думать так: элемент на пересечении $i$-го столбца и $j$-той строки — это скалярное произведение $i$-той строки $A$ и $j$-того столбца $B$. Заметим, что это накладывает ограничение на размерности перемножаемых матриц: если первая матрица имеет размер $n \times k$, то вторая должна иметь размер $k \times m$, то есть «средние» размерности должны совпадать.
Исходное выражение для $f(x)$ теперь можно компактно записать как $f(x) = Ax$ вместо $m$ уравнений с $n$ слагаемыми в каждом.
Напишем функцию, реализующую матричное умножение:
const int n, k, m;
matrix matmul(matrix a, matrix b) {
matrix c(n, vector<int>(m, 0));
for (int i = 0; i < n; i++)
for (int j = 0; j < m; j++)
for (int t = 0; t < k; t++)
c[i][j] += a[i][t] * b[t][j];
return c;
}
Такая реализация хоть и наиболее простая, но не оптимальная: мы на каждой итерации двигаем указатель для $B$ на $m$ шагов вперёд, что приводит к лишним загрузкам кэш-линий и не позволяет компилятору применить автовекторизацию. Однако это легко исправить, если перед всеми циклами транспонировать $B$, то есть поменять каждый её $(i, j)$-тый элемент на $(j, i)$-тый — такая реализация будет работать в 5-10 раз быстрее.
Существуют способы соптимизировать матричное умножение и сильно дальше — в 50-100 раз по сравнению с наивным — но они выходят далеко за рамки этой статьи. Также наука знает способы способы перемножать матрицы асимптотически быстрее чем $O(n^3)$, но на практике они становятся эффективными только на матрицах от нескольких тысяч элементов.
#Свойства матриц
К матрицам не нужно относиться как к табличкам, в которых стоят какие-то числа. Каждой матрице соответствует какая-то линейная функция, как-то преобразующая вектора. Центральными объектами линейной алгебры являются именно линейные функции, а не матрицы.
Благодаря этому взаимно однозначному соотношению все ранее упомянутые свойства линейных функций переносятся и на матрицы:
- Сумма матриц $A$ и $B$ тоже является матрицей: $C = A+B: C_{ij} = A_{ij} + B_{ij}$.
- Сумма матриц коммутативна: $A+B = B+A$.
- Сумма матриц ассоциативна: $(A+B)+C = A+(B+C)$.
- Умножение матриц ассоциативно: $(AB)C = A(BC) = ABC$.
- Умножение матриц в общем случае не коммутативно.
Матрицы не обязательно рассматривать только для действительных чисел — все эти свойства переносятся на произвольные поля: множества, для которых определены $*$ и $+$ с определенными ограничениями на операции.
Самый популярный класс таких полей — остатки по простому модулю. В частном случае, когда $p = 2$, в поле будет всего два элемента — ноль и единица — а также xor в качестве сложения и and в качестве умножения. Это позволяет эффективно хранить матрицы в виде битовых последовательностей.
#Примеры матриц
Матрица «увеличь всё в два раза»:
$$ \begin{pmatrix} 2 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 2 \\ \end{pmatrix} $$ Матрица «поменяй $x$ и $y$ местами»: $$ \begin{pmatrix} 0 & 1 \\ 1 & 0 \\ \end{pmatrix} $$ Матрица поворота на угол $\alpha$ на плоскости: $$ \begin{pmatrix} \cos \alpha & -\sin \alpha \\ \sin \alpha & \cos \alpha \\ \end{pmatrix} $$ Матрица проецирования на плоскость $xy$ в трёхмерном пространстве: $$ \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 0 \\ \end{pmatrix} $$ Матрица «ничего не делай», также известная как единичная матрица: $$ I_3 = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix} $$ Единичную матрицу обычно обозначают как $I$ или $E$. На её главной диагонали всегда единицы, а вне — нули.